
In today’s rapidly evolving world of automation and robotics, the ability for machines to sense and respond to physical interactions is more important than ever. From assembling delicate components to performing precise surgical tasks, robots must be able to feel the world around them.
This is where force torque sensors come into play—equipping robots with the sensitivity and intelligence needed to operate safely, efficiently, and autonomously.
What is a Force Torque Sensor?
A robotic force torque sensor is a precision device that detects and quantifies force and torque applied to a given point. It captures both linear forces and rotational torques, generating a signal that can be recorded and used as real-time feedback in human-robot interactions.
The most commonly used type in robotics is the 6-axis force torque sensor, capable of detecting three force components (X, Y, Z) and three torque components (roll, pitch, yaw).
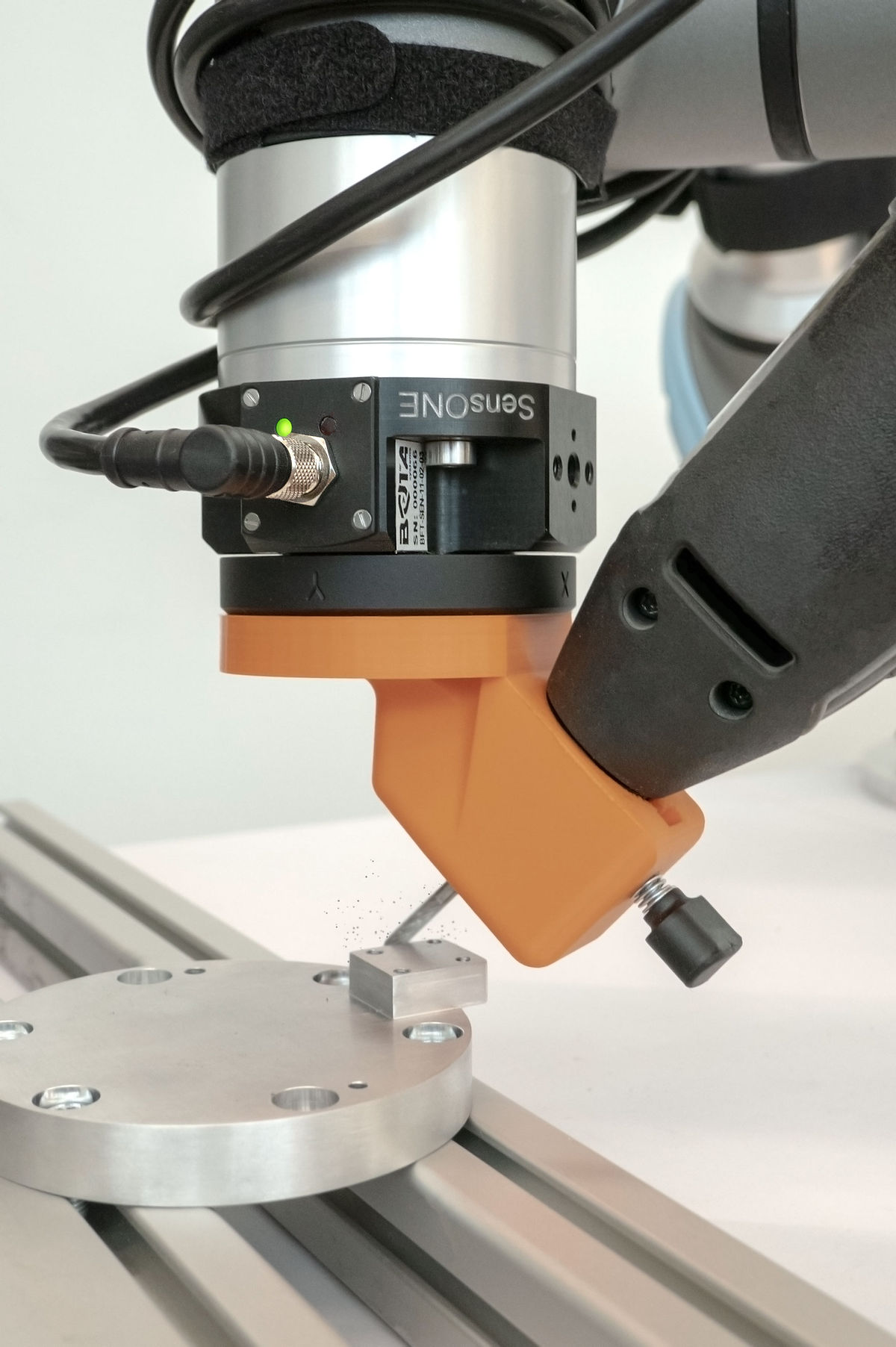
Watch the 6-axis force torque sensor video below to see a SensONE robotic force sensor in action:
Key Applications of Force Torque Sensors
These sensors are critical in a wide variety of industries and applications, especially in collaborative robotics. Typical use cases include polishing, assembly, grinding, quality inspection, and even robot-assisted surgery.
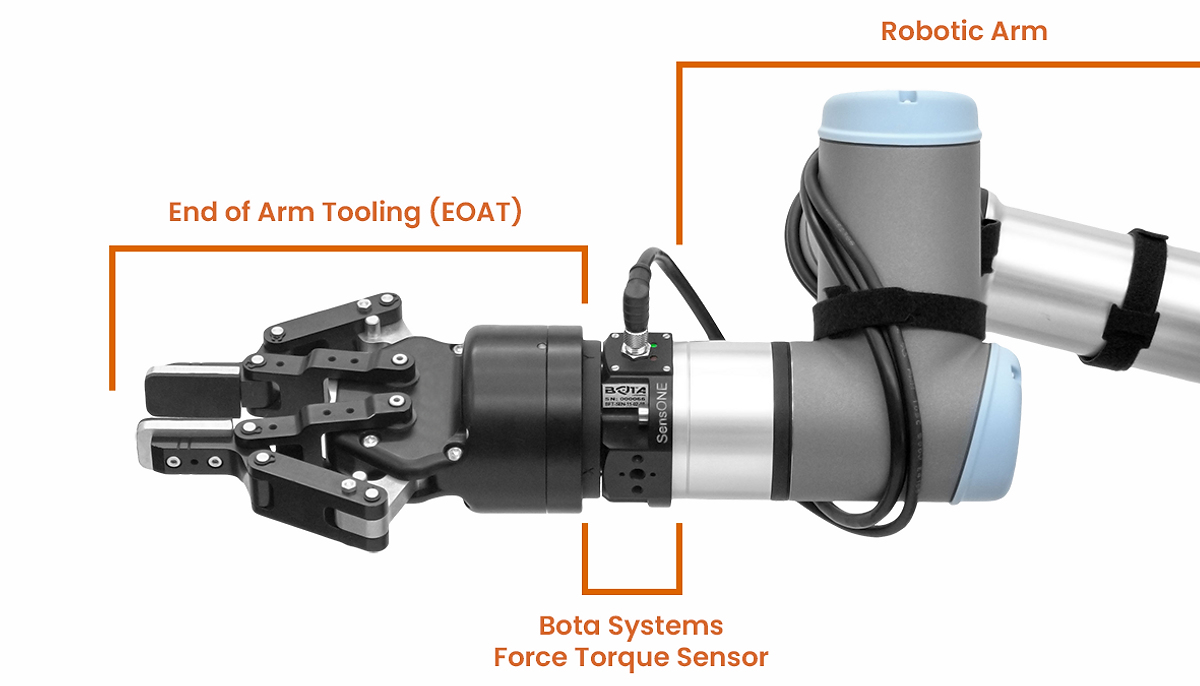
In most applications, the sensor is positioned between the robot arm and the end-of-arm tooling (EOAT), where it provides real-time feedback to guide the robot’s movements and force application.
Below are key industry sectors and applications where force torque sensors are making a significant impact:
Industrial Automation
Assembly: Robots use force torque sensors to dynamically adjust their force and path, allowing for accurate alignment and insertion of components.Machining & Grinding: Sensors maintain optimal pressure during surface processing, ensuring consistent material removal and high-quality finishes.
Material Handling: Provides feedback that allows robots to grip or release objects with the appropriate amount of force, preventing slippage or damage.
Surface Processing
Polishing & Buffing: Ensures even surface treatment by applying consistent force across varying geometries.
Deburring: Adapts to small surface irregularities, improving precision while enhancing safety and efficiency.
Quality Testing & Inspection
Force Verification: Accurately measures applied force during testing to detect assembly errors, material inconsistencies, or functional issues in manufactured products.
Medical and Surgical Robotics
Robot-Assisted Surgery: Provides the precision and sensitivity required for delicate procedures, helping surgeons operate with enhanced control.
Rehabilitation: Assists in guiding and supporting patient movements, allowing for safe and adaptive physical therapy exercises.
Collaborative Robots (Cobots)
Human-Robot Interaction: Enables cobots to sense touch, detect collisions, and adjust behavior in real time—ensuring safe and intuitive collaboration with human workers.
Humanoid AI-controlled Robots
Manufacturing: Enables humanoids to balance, walk around safely, manipulate with precision, and adjust behavior in real time—ensuring safe and intuitive collaboration with human workers.
Household: Humanoids will be operating in human spaces and use human tools with the same efficiency as humans.
Force Torque Technology
Force torque sensors operate using static and dynamic measurement techniques. These involve detecting strain caused by applied forces and torques through resistive, capacitive, or optical technologies.
Among these, resistive strain gauges are the most reliable and widely adopted due to their high accuracy—especially when used with materials like steel, aluminum, or titanium.
Bota Systems sensors are manufactured with a special aluminium or steel alloy in their sensors, chosen for its long-term elastic stability and high yield strength. Additionally, each sensor is also heat-treated to mitigate creep and ensure consistent, long-term measurements.
To maintain optimal performance, we address potential sources of error at the hardware level, minimizing non-linearities that software alone cannot correct. Our sensors incorporate:
Temperature and gain offset compensation
Ratiometric voltage conversion
Symmetrical load distribution
EMI shielding
Parasitic capacitance and inductance compensation
These features work together to reduce error margins and maximize the signal-to-noise ratio.
Why Force Torque Sensors Matter in Robotics
Force torque sensors are central to the development of safe, responsive, and intelligent robots. As robotics increasingly moves toward collaborative environments, where humans and robots work side by side, the need for precise interaction feedback becomes essential.
FT sensors empower robots to:
Adapt to surface contours (for polishing or sanding)
Detect contact with objects or humans (for safety and cooperation)
Ensure precise alignment (in assembly and insertion tasks)
Maintain consistent force (in pressing or tightening applications)
Perform quality control (by detecting force anomalies)
These capabilities open the door for automation in previously difficult or delicate tasks.
Analog or Digital Force Torque Sensor?
When comparing analog and digital force torque sensors, digital sensors offer several clear advantages:
Consistently low and predictable noise levels
Immediate access to usable data
Built-in temperature drift compensation
Simplified harnessing and wiring
No signal aliasing—data is either accurate or absent

However, digital sensors require advanced embedded electronics, which must be carefully designed for reliability in extreme environments (e.g., high temperature, radiation, or pressure). At Bota Systems, we specialize in creating rugged digital sensors that maintain performance in demanding applications, from aerospace to nuclear inspection.
Contact our team today to discuss your application needs or request a quote.
The Future: Integrating Force Torque Sensing with AI and Robotics
The future of robotics lies at the intersection of intelligent perception and precise control, and force torque sensors are at the heart of this transformation.
When combined with machine learning and artificial intelligence, force torque data can be used to:
Detect and classify objects by touch
Identify terrain or surface types in real time
Perform dynamic path planning based on contact feedback
Enable robots to adaptively grasp unfamiliar items
Learn from physical interactions through reinforcement learning
As robots evolve to be more autonomous, force torque sensors will become essential “sense organs,” enabling them to interact with the world in a nuanced, human-like manner.
Why Choose Bota Systems?
At Bota Systems, we are dedicated to pushing the boundaries of precision, reliability, and integration in force torque sensing. Our force torque sensors are designed to support your most demanding tasks—whether you’re building collaborative robots, automating surgical procedures, or developing the next generation of AI-driven machines.
Contact our experts to learn more about integration, customization, and support.



