Powered by the Sense of Touch - Engineered for the Future of Robotics
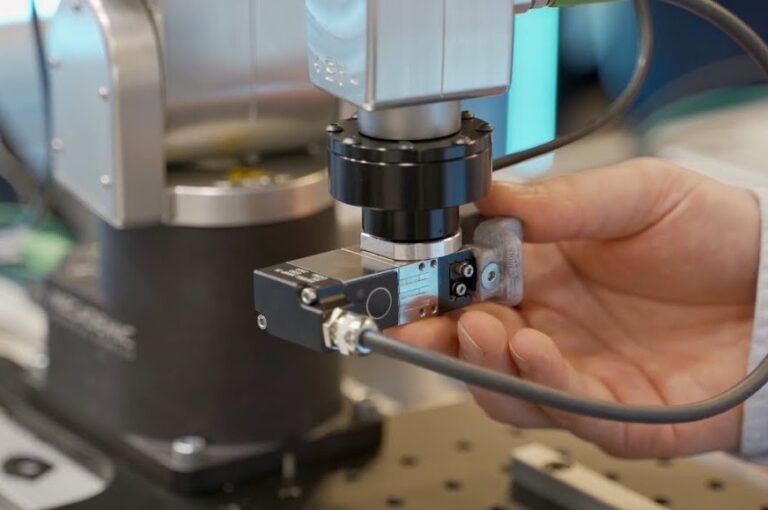
High-precision, compact 6-axis force torque sensors, torque sensors, tactile sensors and software that enable robots to feel, learn, and interact with the physical world.
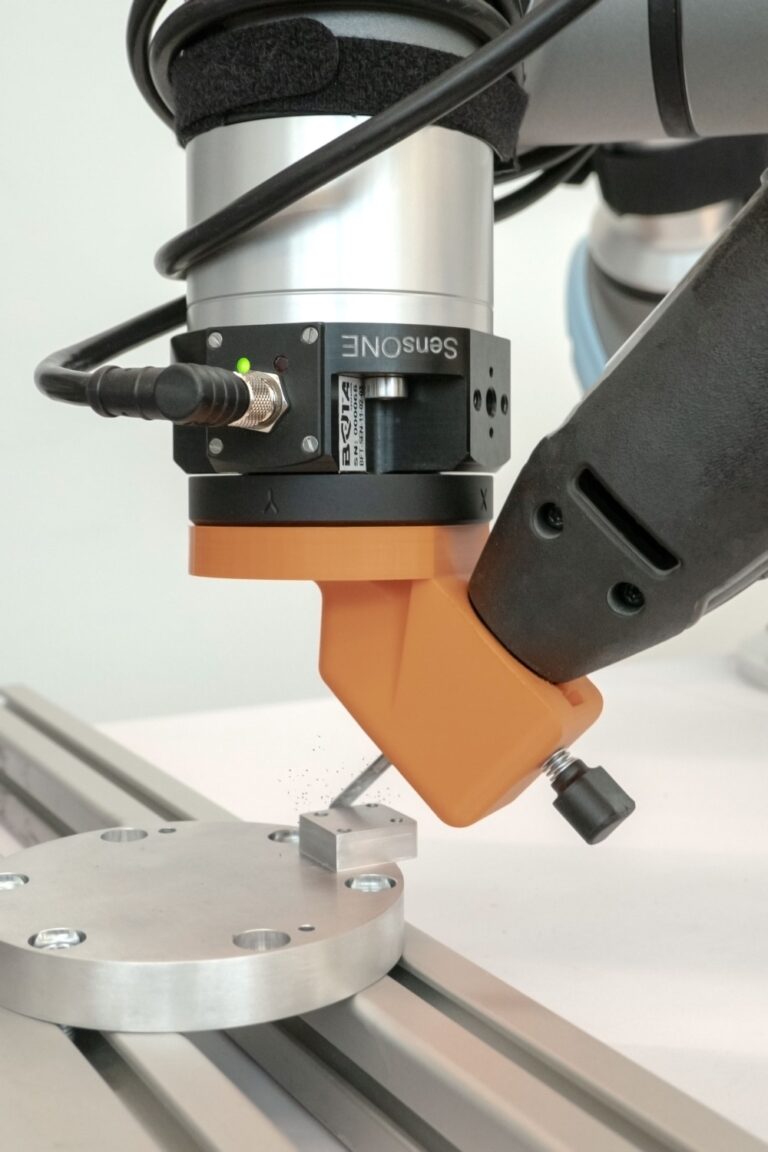
Bota Systems offers a complete portfolio of high-precision force torque sensors, all-in-ONE with integrated electronics, IMU, temperature sensing, and compensation for simplified integration.
MiniONE
Ultra-compact force torque sensor for space-limited applications.
From manufacturing to research, our force torque sensors enable precise, adaptive robot behavior across industrial automation and Physical AI applications. Our turnkey solutions minimize the time to market for anyone wishing to automate.
Physical AI Training Platform
Enable robots to learn from physical interaction — not just vision or simulation.
High-fidelity force and torque data provides a critical modality for Physical AI, supporting kinesthetic teaching, teleoperation, and the collection of high-quality datasets for learning-based robotic systems.
A full-stack system that connects through a web browser.
Haptic teleoperation enables operators to remotely control robots with real-time force feedback, making manipulation more precise and intuitive.
By combining high-resolution sensing with low-latency response, it enhances safety, reduces programming effort, and generates synchronized data for Physical AI model learning.
Best for Hazardous environments, multiple follower devices and remote access.
Kinesthetic teaching enables users to train robots by physically guiding them through tasks, capturing synchronized motion, force, tactile, and visual data in real time.
This approach eliminates the need for coding while accelerating deployment and generating structured datasets for learning-from-demonstration and Physical AI systems 10x times faster.
Best for Retrofitting in existing installations and extremely efficient and intuitive demonstration.
Bota Systems designs and manufactures force torque sensors in Switzerland, delivering reliable, high-precision force data for real robotic applications.
Built on years of research, our sensors simplify force sensing — enabling accurate interaction with the physical world while reducing integration effort.